検知レーダーシュミレーション
検知レーダーシュミレーション
概要
船舶・航空機等の検知レーダーシュミレーション(β版)です。
船舶・航空機等の検知(探知)を目的としたレーダーシュミレーションです(参考機能)。
デモ機能が有りゲーム感覚ですが、画像地図への作図結果はデモを排除した真面目なものです。
本来別ソフトですが、回線設計レーダーシュミレーションの補完機能としてとして無料で提供。
回線設計の2011年版は試用期間となり、2012年版より参考機能とする予定です。
2014年版より対空レーダでマルチスタティック及びステルス機の反射方向のデータ設定可能とする対応追加
2018年版よりGoogleEarth API停止に対応し変更有り
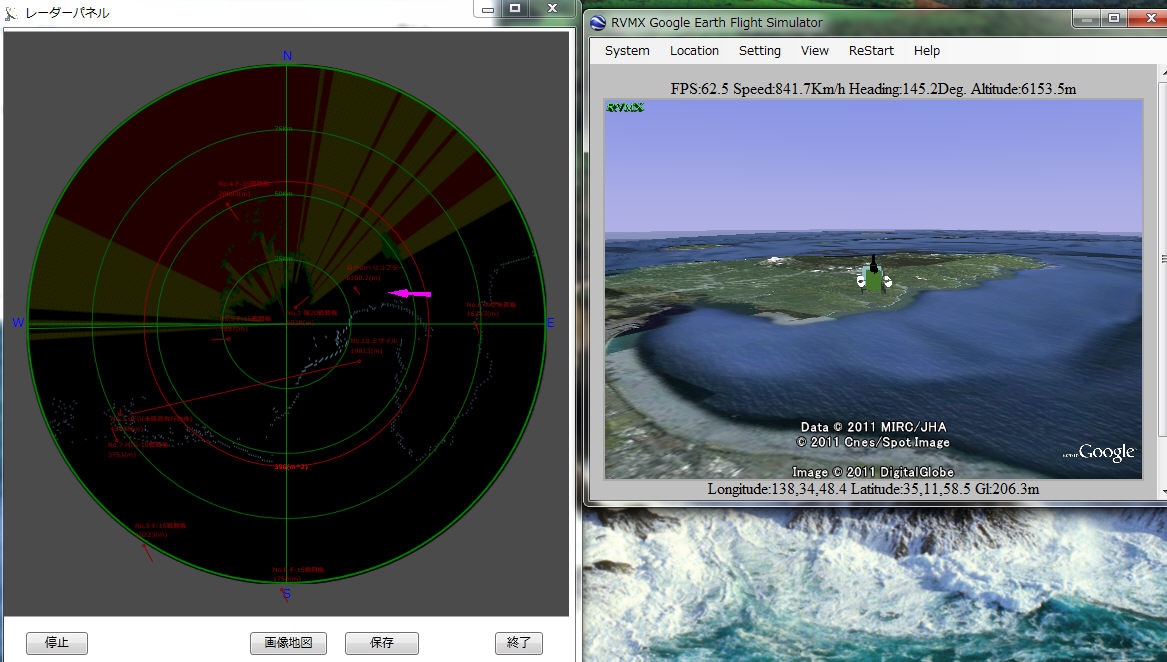
自分でヘリコブターを操縦(RVMXフライトシュミレータ)して、富士山より伊豆半島方向へ、ピンク矢印
1.利用方法
・回線設計よりの起動方法
サブメニュー、より起動
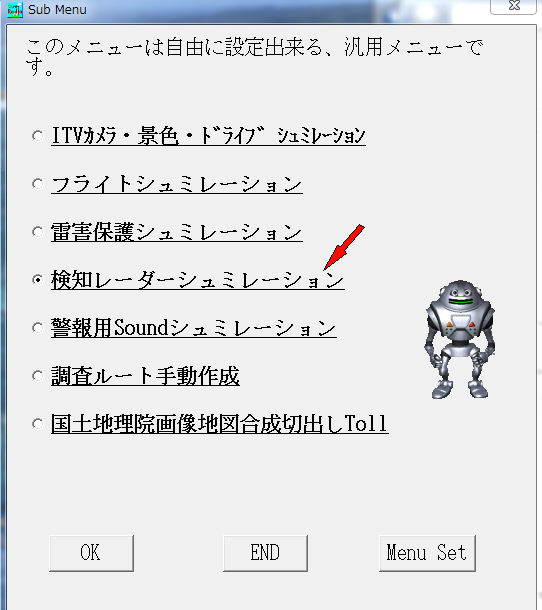
インターネットに接続できないと、メニュー候補に出てきません。
但し、既にメニューに設定済の時は後ろに(Not Available)が付きます
2.初期画面
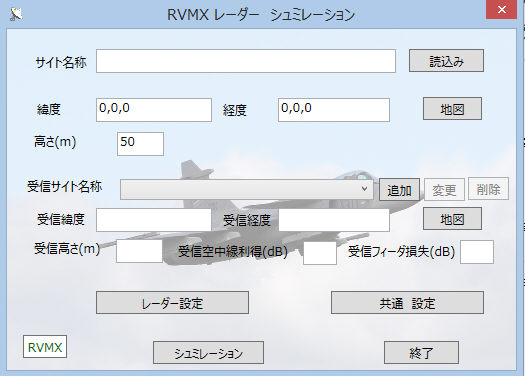
a.サイト名称 レーダサイトの名称
b.読込みボタン 既存データの読込み(回線設計のレーダーファイルも読込み可能)
c.緯度・経度 レーダサイトの緯度・経度(フォーマツト例 35,1,2)
d.地図ボタン 地図より緯度経度を設定
目的の地点をダブルクリックにより設定

e.高さ アンテナの海抜高(m)
f.受信サイト名称 マルチスタティク用受信サイト
g.受信緯度・経度 〃 の緯度・経度(フォーマツト例 35,1,2)
h.受信高さ 〃 のアンテナの海抜高(m)
i.受信空中線利得(dB) 〃 の空中線利得
j.受信フィーダー損失(dB) 〃 のフィーダー損失(dB)、正の値で入力
k.追加ボタン 〃 の追加
l.変更ボタン 〃 の変更
m.削除ボタン 〃 の削除
n.レーダー設定ボタン レーダー関係の詳細設定
o.共通設定ボタン 共通条件の設定
p.シュミレーションボタン シュミレーションの開始
q.終了ボタン ソフトの終了
・コンテキストメニュー マウスの右ボタンクリックで表示
a.Help 本ファイル
b.Version ソフト情報表示
c.End ソフトの終了
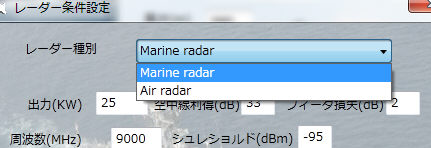
3.レーダー条件設定
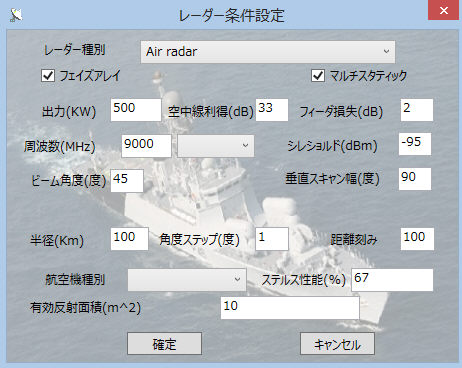
a.レーダー種別 対空と海上用が有ります
b.フェイズアレイ フェイズアレイ方式(イージス艦等)(ソフト内ではデモの再現速度が違うだけです)
c.マルチスタティック マルチスタティック方式(複数の受信サイトを追加)(対空のみ)
d.出力(KW) レーダー出力(KW)
e.空中線利得(dB) 空中線利得
f.フィーダー損失(dB) フィーダー損失(dB)、正の値で入力
g.周波数(MHz) レーダー周波数(MHz)
h.スレッショルド(dBm) レーダー受信スレッショルドレベル(dBm)
i.ビーム角度(度) 空中線のチルト角
j.ビーム幅(度) ビーム幅(度)(垂直スキャンも含む)
k.半径(Km) シュミレーション半径(Km)
l.角度ステップ(度) 〃 角度刻み(度)
m.距離刻み 〃 距離刻み数
n.ステルス性能(%) ステルス性能を%で、例、反射を1/100に抑える性能なら99%
範囲の円を描き用、カンマで区切り複数設定可能(例 0,25,50,75)
但し、船のトン数や航空機の反射面積が複数設定されている時は、
そちらが優先します、ステルス値は一番目の値が使われます。
海上用
o.船のトン数 範囲の円を描き用、カンマで区切り複数設定可能(例 5000,1000,500,100)
対空用
p.反射面積(m^2) 航空機の反射面積、カンマで区切り複数設定可能(例 100,50,10,5)
q.航空機種別 サンプル航空機種別より反射面積とステルス性能を設定可能

r.確定ボタン 設定を有効とする
s.キャンセル キャンセル
4.共通条件画面
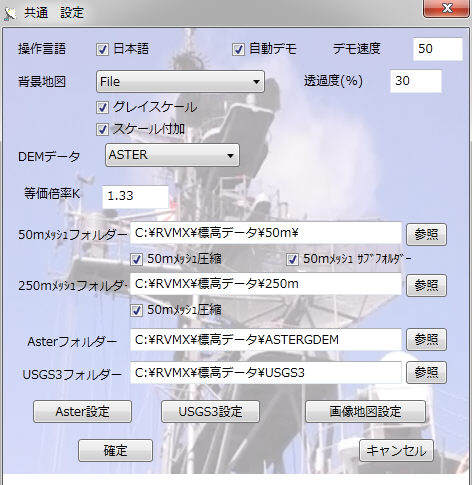
a.操作言語 日本語のチェックのON/OFF
b.自動デモ 自動的にデモ用航空機や船舶を設定する
c.デモ速度 デモ時の速度倍率
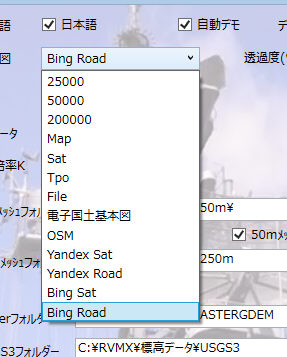
d.背景地図 画像地図を使うときの設定
e.透過度 画像地図上に描くパターンの透過度(%)
f.グレースケール 〃 を白黒とする
g.スケール付加 〃 に距離スケールを付加
h.DEMデータ 地形判定用DEMデータ

但し、50mメツシュと250mメッシュは日本国内のみ
i.等価倍率K 地球の等価倍率
j.50mメッシュホルダー 50mメッシュホルダー
k. 〃 参照ボタン 〃 の設定
l.50mメッシュ圧縮 圧縮フォーマットの50mメッシュ
m.50mメッシュサブフォルダー 50mメッシュでサブフォルダー付き
n.250mメッシュホルダー 250mメッシュホルダー
o. 〃 参照ボタン 〃 の設定
p.250mメッシュ圧縮 圧縮フォーマットの250mメッシュ
q.ASTERホルダー ASTERホルダー
r. 〃 参照ボタン 〃 の設定
s.USGS3ホルダー USGS3ホルダー
t. 〃 参照ボタン 〃 の設定
u.ASTER設定ボタン ASTER設定ボタン
v.USGS3設定ボタン USGS3設定ボタン
w.画像地図設定ボタン 画像地図設定ボタン
x.確定ボタン 設定を有効とする
y.キャンセル キャンセル
5.レーダパネル表示
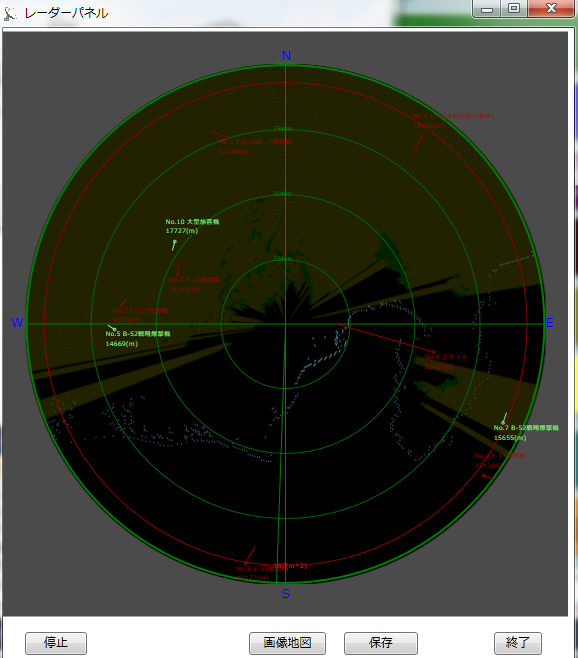 緑は検知・赤は未検知
緑は検知・赤は未検知
a.レーダパネル 各種情報を表示するレーダーパネル
b.停止ボタン アンテナの回転を停止
c.画像地図ボタン 結果を画像地図上に表示
d.保存ボタン レーダー条件をファイルへ保存
e.終了ボタン レーダパネル表示を閉じる
・コンテキストメニュー マウスの右ボタンクリックで表示
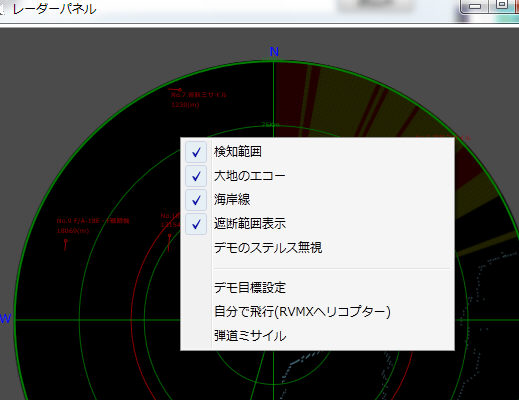
f.検知範囲 レーダーにより検知可能範囲を表示
g.大地のエコー レーダー波が大地に当たる部分の表示
h.海岸線 海岸線を表示
i.遮断範囲表示 レーダー波が大地等で遮断される範囲を表示
j.デモのステルス無視 デモの対象が持っているステルス機能を無しとする
k.デモ目標設定 デモの航空機や船(ターゲット)を設定、マウスでクリックした位置に追加
 対空用
対空用
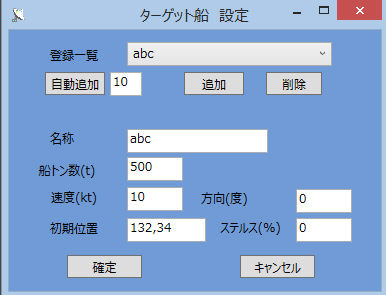 海上用
海上用
k-1.登録一覧 登録済みデモの航空機や船(ターゲット)の一覧
k-2.自動追加 自動的に追加されす数
k-3.追加ボタン 下記の節制を登録追加
k-4.削除ボタン 一覧選択中のターゲットを削除
海上用
k-6.名称 ターゲットの名称
k-6.船のトン数 〃 トン数
対空用
k-5.候補一覧 サンプル航空機種別より反射面積とステルス性能及び速度範囲を設定可能
k-6.名称 ターゲットの名称
k-7.高度(m) 飛行高度(m)
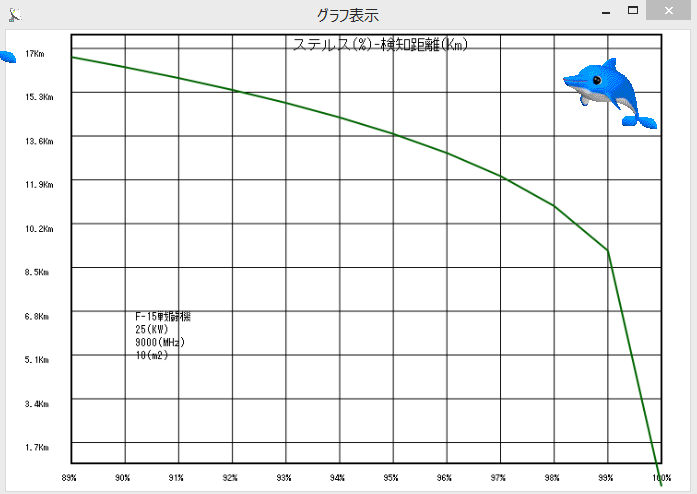
k-12.ステルス比較 ステルス%と検知距離のグラフ作成
k-13.反射パターン確認 ステルス機のレーダ波入射方向に対する反射パターングラフによる確認(パターン登録が有るとき有効)
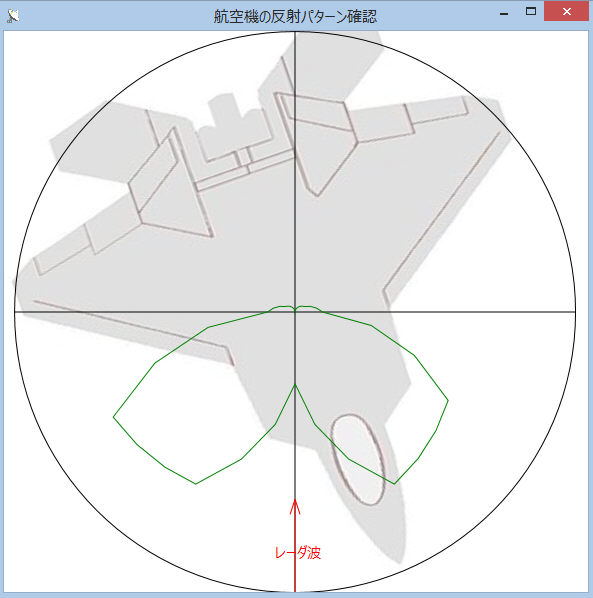 マウスで任意の方向に機体を回転できます
マウスで任意の方向に機体を回転できます
共通
k-8.速度(Km/h) ターゲットの速度
k-9.方向(度) 〃 の進行方向
k-10.反射面積(m^2) 〃 の電波反射面積
k-11.ステルス性能(%) 〃 のステルス性能 例、反射を1/100に抑える性能なら99%
k-14.初期位置 〃 の初期位置を設定
center->レーダサイト
経度:緯度(132.34:34.33)->緯度経度指定
方向(度);距離(Km)->方向と距離を指定
注意:共通条件の自動デモがチェックされていると、この画面場出てきません、その代わり自動的に自動追加数のデモ機が追加されます。
l.自分で飛行 RVMXフライトシュミレーションで指定した位置より飛行(ヘリコブター)
m.弾道ミサイル RVMXロケットシュミレーションで指定した位置よりミサイルを発射
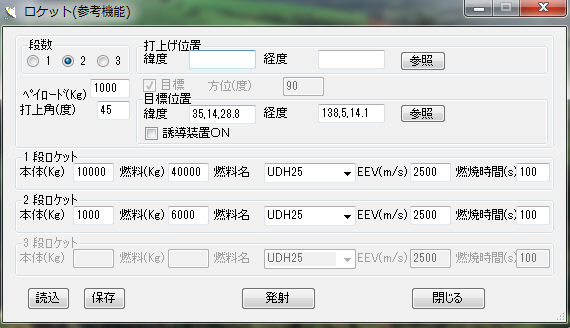
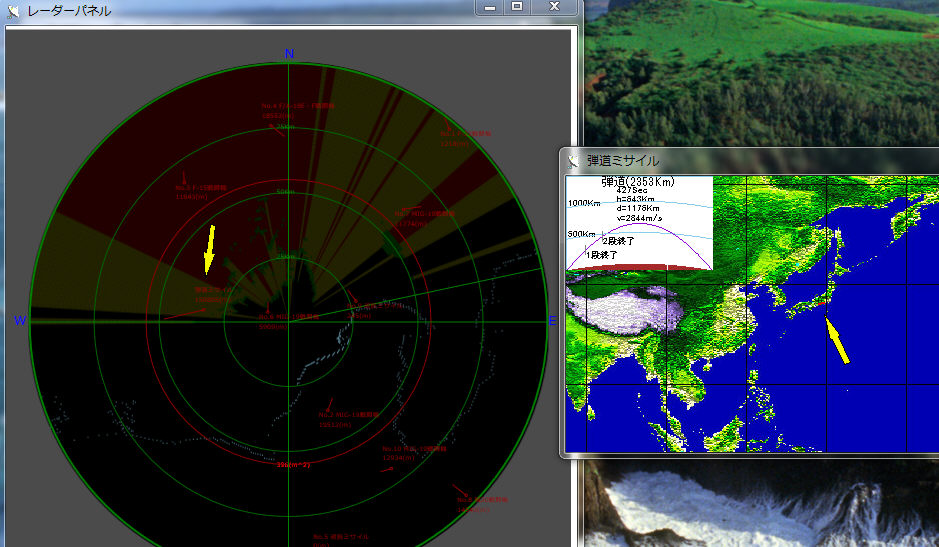
多段ロケットの時は、早い段階で検知しないと、反射面積が減少し飛行高度が高く成る為、検知し辛く成ります。
6.ステルスと検知距離カーブ
ステルス比較を押すことにより作成できます。
7.マルチスタティック
a.マルチスタティックの例。
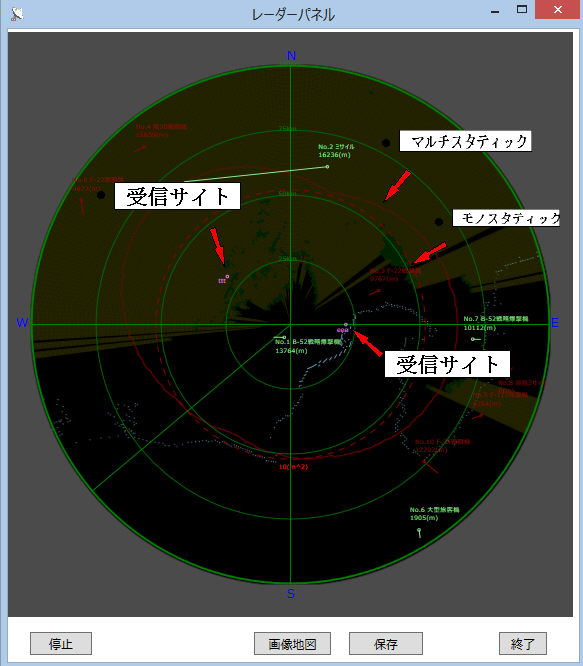
b.ステルス機の反射方向のデータ設定
利用言語の航空機名で拡張子をpatternで作成
データフォーマット
頭に//が付いている行はコメント行として無視されます。
0:1,3,2,0.5,0.2,0.1,0,0.1,0.2,0.5,2,3//意味=レーダ波進入角度0°方向のときの反射データ、この場合は12個のため、30°単位の比率(/合計値)1/12.6,3/12.6,2/12.6,0.5/12.6・・・
30:1.5,4,4,0.5,0.2,0.1,0,0.1,0.2,0.5,5,4//意味=レーダ波進入角度30°(角度間隔は任意)・・・・
・・・・
以下同じ方法で180°分登録
反射方向のデータ設定が設定されると、航空機のステスルチは電波の吸収比として意味を持ちます。
8.画像地図上に表示
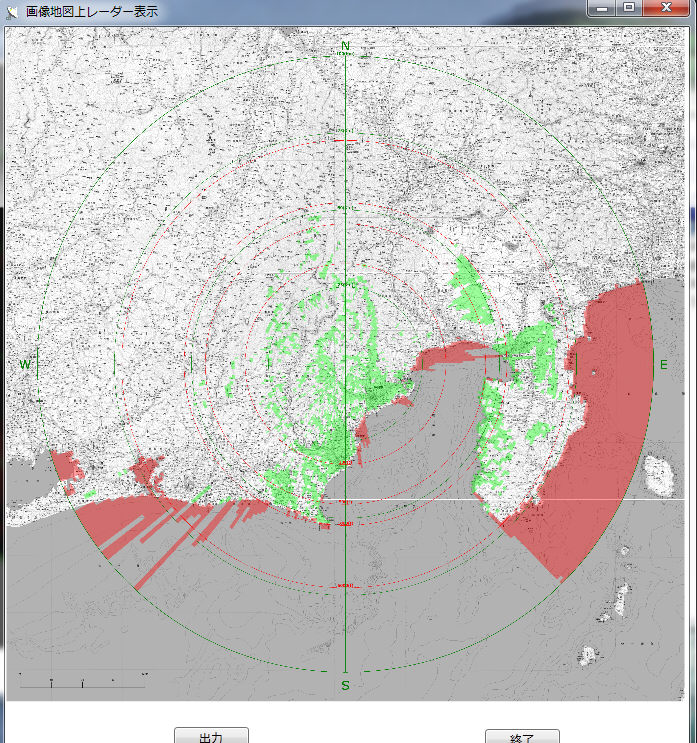 海上用の例
海上用の例
a.出力 各種出力設定
b.終了 画像地図上に表示を閉じる
9.その他
航空機の候補はairplane.configに有りますが、ユーザーさんご自身で追加変更された時は、myairplane.configに保存して下さい
このHelpに使われている、レーダサイトは架空のものです。
デモは、各デモ機(船)は単独(レーダーシュミレーションとは別に)で動作し、レーダーシュミレーションは、それをとらえて判別します
検知出来ない時は、レーダー出力(実際に1000KW以上も有り)・空中線利得・シレッショルド(受信機を冷やして)を下げる等を試してみて下さい。
注意:
WPFを利用している為、.Net Framework3.0以上がインストールされている必要が有ります。
現在β版で、完成予定は未定です。
本ソフトは、サポートの対象外となります
提供ソフトのQ&A
(有)RVMX

