RVMX レーザガン シュミレータ参考(β版)
RVMX レーザガン シュミレータ参考(β版)
概要 RVMX レーザガン シュミレータ参考(β版)です。
近年の防衛は安価なドローンや無人機による攻撃に対して対処する必要が出てきました。
高価なレーダーシステムやミサイルでの対応には費用対効果の面で問題があります。
そこで未来技術ではありますが、レーザーを使った防衛が考えられています、
現にアメリカ軍では試射(ゲーム用スコープ操作機で)もしています。
ただ、レーザは空気中の伝搬で減衰するため長距離には向いていません、
よって攻撃してくるものに対しての短距離での対応に向いています。費用も大変安価(1発射約10ドル以下)です。
レーザガン自体は既に医療や金属加工及び測量などにも応用されています。
よって本シュミレーションは将来技術で実現できる可能性のある防衛に特化したものにしています。
本来別ソフトですが、回線設計ユーザーに対して参考で配布します。
回線設計の2024年版以降で動作し、2024年版は試用期間となり、2025年版より参考機能とする予定です。
 ドローンを撃墜例
ドローンを撃墜例
1.動作原理概要
-1.レーザーの波長と出力及び標的までの距離及び照射時間より、到達エネルギー(J)を算出。
-2.途中の減衰は所定の式と波長による透過率を考慮します
-3.地形の影響(地形による遮蔽)も考慮する機能も付加しています(Cesium利用で実現しています)
-4.標的の必要破壊エネルギー/面積より、破壊が可能か判定
-5.照準に合わせるのにはアメリカ軍の試射の方式(ゲームコントローラによる照準)を採用。
-6.概略の構成とフローを示します。
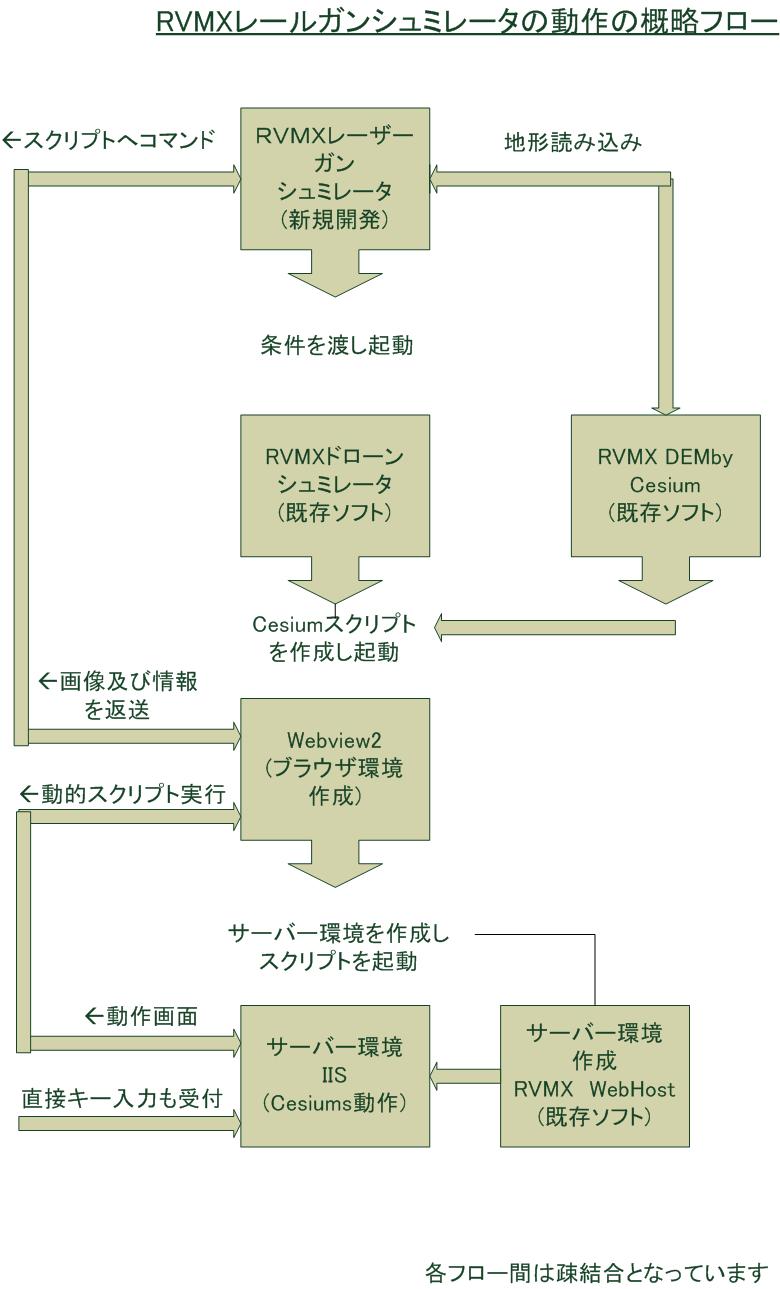
a.RVMX レーザガンシュミレータ 新規開発
b.RVMXドローンシュミレータ 既存ソフトに機能追加して利用
c.RVMX WebView2クラス(WebView2を使った非公開のブウザクラス) 単独機能は非公開の既存ソフトに機能追加して利用,
Edge(Chromium)による地図より緯度経度を取得する機能(評価機能)
d.PC内にサーバー環境を作成するRVMX製ソフト 単独機能は非公開の既存ソフト、
利用例PC単独で近距離にネットワークによるテンポラリー情報提供Tool(参考)
e.Cesiumより地形取得の既存ソフトRVMX 全世界対応のCesiumを使ったDEM読み取りクラス(β版)のご紹介
地形読み取りの構成はRVMX レーザガンシュミレータより起動し、RVMX WebView2クラス経由で動作させます。
f.各フロー間は疎結合(ファイル経由)又はプロセス間通信(IPC)で行っています。
2.インストールおよび立ち上げ方法
・回線設計よりの起動方法
サブメニュー、より起動
3.概要・操作紹介
・初期画面
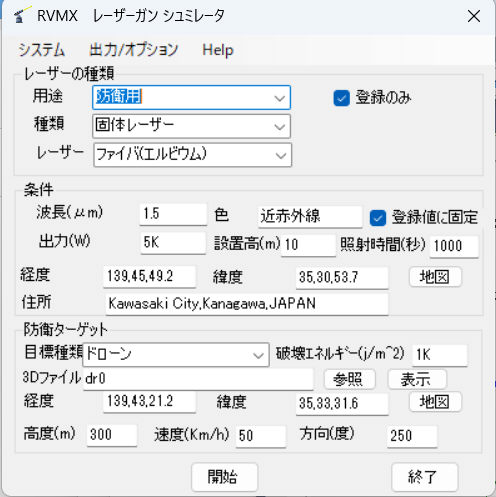
-1.レーザーの種類
a.用途
現在は防衛用のみしか動作していません。その他は現実に実用化されている為、本シュミレーションで検証する必要がないと判断しました
b.種類
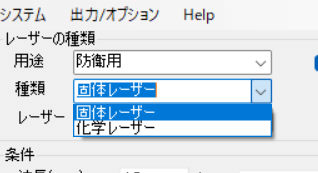
b-1.防衛用
b-1-1.個体レーダ
b-1-2.化学レーザー
b-2.産業用(未開発)
b-2-1.半導体レーザー
b-2-2.個体レーダ
b-2-3.気体レーザー
b-3.医療用(未開発)
b-3-1.半導体レーザー
b-3-2.個体レーダ
b-3-3.気体レーザー
b-3-4.液体レーザー
b-4.測量用(未開発)
b-4-1.気体レーザー
b-5.核融合用(未開発)
b-5-1.化学レーザー
b-6.通信用(未開発)
b-5-1.半導体レーザー
b-5-2.個体レーダ
b-7.未開発種類を選択する下記のメッセージが出ます。
c.レーザー 現在登録されているものの一覧、これらは動的に追加できる様になっています
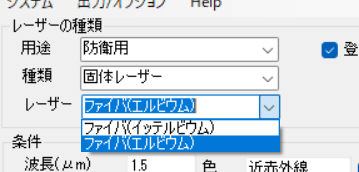
c-1.防衛用
c-1-1.個体レーダ
c-1-1-1.ファイバ(イッテルビウム)
c-1-1-2.ファイバ(エルビウム)
c-1-2.化学レーザー
c-1-2-1.フッ化水素
c-1-2-2.フッ化重水素レーザー
c-1-2-3.化学酸素ヨウ素
c-2.産業用(未開発)
c-2-1.半導体レーザー
c-1-2-1.InGaN
c-1-2-2.AIGaAs
c-1-2-3.InGaAsP
c-2-2.個体レーダ
c-2-2-1.YAG
c-2-2-2.YVO4
c-2-2-3.ファイバ(イッテルビウム)
c-2-2-4.ファイバ(エルビウム)
c-2-3.気体レーザー
c-2-3-1.CO2
c-2-3-2.アルゴン
c-2-3-3.エキシマ(アルゴン・フッ素)
c-2-3-4.エキシマ(クリプトン・フッ素)
c-2-3-5.エキシマ(キセノン・塩素)
c-2-3-6.エキシマ(キセノン・フッ素)
c-3.医療用(未開発)
c-3-1.半導体レーザー
c-3-1-1.InGaAsP
c-3-2.個体レーダ
c-3-2-2.YAG
c-3-2-2.ファイバ(イッテルビウム)
c-3-2-3.ファイバ(エルビウム)
c-3-3.気体レーザー
c-3-3-1.CO2
c-3-3-2.アルゴン
c-3-3-3.エキシマ(アルゴン・フッ素)
c-3-3-4.エキシマ(クリプトン・フッ素)
c-3-3-5.エキシマ(キセノン・塩素)
c-3-3-5.エキシマ(キセノン・フッ素)
c-3-4.液体レーザー
c-3-4-1.色素
c-4.測量用(未開発)
c-4-1.気体レーザー
c-4-1-1.
b-4.測量用(未開発)
b-4-1.気体レーザー
c-5.核融合用(未開発)
c-5-1.化学レーザー
c-5-1-1.フッ化重水素レーザー
c-6.通信用(未開発)
c-5-1.半導体レーザー
c-5-1-1.InGaAsP
c-5-2.個体レーダ
c-5-2-1.ファイバ(イッテルビウム)
c-5-2-2.ファイバ(エルビウム)
-2.条件
a.波長(μm) レーザーの波長
b.出力(W) 〃 出力
c.色 〃 色種別
d.設置高(m) 〃 設置高(m)[地上高]
e.照射時間(秒) 〃 照射時間(秒)
f.登録値に固定 〃 波長(μm)・出力・色を事前登録値に固定します。
g.緯度経度 〃 の設置位置
h.地図ボタン 〃 の設置位置確認と再設定
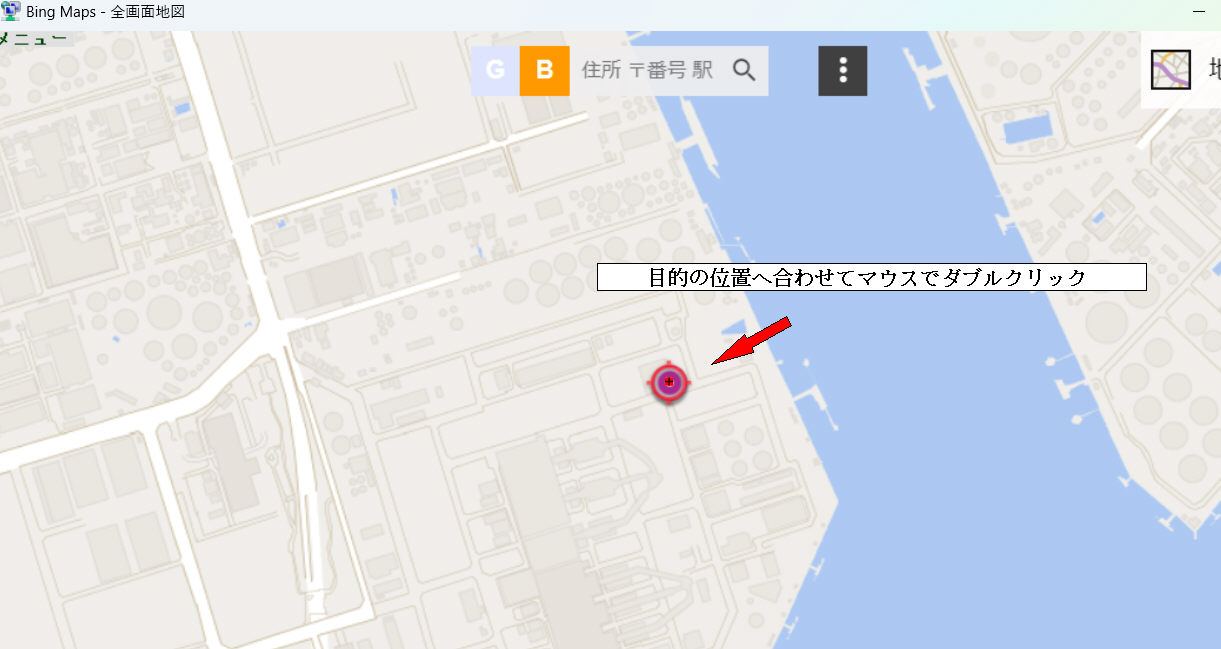
再設定は中心マークを目的の位置に合わせて、中心にマウスを持っていくと手のマークになりますので、ダブルクリック、
地図の操作は以降も同じなので省略
i.住所 〃 の設置位置住所(自動取得)、全世界対応の為英語表記
-3.防衛ターゲット 攻撃してくる敵に対しての防衛目標
a.目標種類 ターゲットの種別
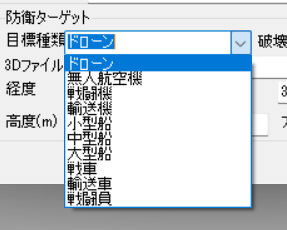
a-1.ドローン
a-2.無人航空機
a-3.戦闘機
a-4.輸送機
a-5.小型船 地形による遮蔽により見えない時があります、見通図で確認必要
a-6.中型船 〃
a-7.大型船 〃
a-8.戦車 地形による遮蔽により見えない時があります、見通図で確認必要,又ターゲット以外への照射に注意が必要です
a-9.輸送車 〃
a-10.戦闘員 〃
b.破壊エネルギー(j/㎡) 破壊に必要なエネルギー
c.3Dファイル Cesiumで表示する3Dファイル(glb)指定、目標種類に対しての標準値は設定済み
d.参照ボタン 任意3Dファイルの指定
e.表示 3DファイルをCesiumでの表示確認
f.緯度経度 目標の設置位置
g.地図ボタン 〃 の設置位置確認と再設定
h.高度(m) 〃 地上高高度(m)
i.速度(Km/h) 〃 の移動速度
j.方向(度) 〃 の移動方向
-4.開始ボタン シュミレーションの開始
-5.終了ボタン ソフトを終了します。
・プルダウンメニュー
-1.システム
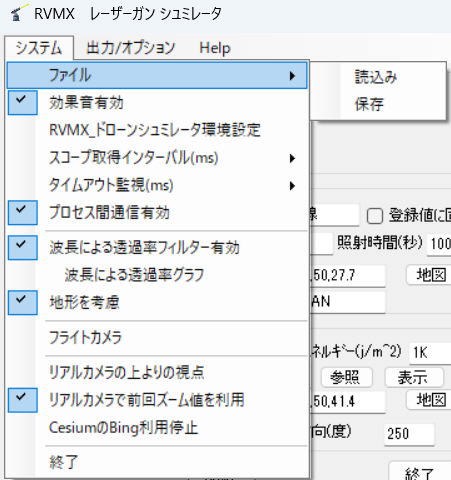
a.ファイル
a-1.読込み ファイルよりデータを読み込み再現します。
a-2.複数読込み地図表示 保存済み複数ファイルより地図へ表示

a-3.保存 現在のデータを保存します
b.効果音有効 .効果音やメツセージを出します
c.RVMXドローンシュミレータ環境設定 RVMXドローンシュミレータを利用している為、関連する環境のみを設定

c-1.サーバーモード Cesiumを動作させるサーバー環境の設定、
但し、RVMXドローンシュミレータが動作中の時は、この環境を利用の為無視されます
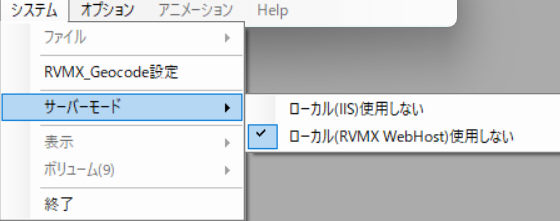
c-1-1.ローカルIISを利用しない WindowsOS機能のIISが(有)な時、これを使用しないに設定
c-1-2.ローカル(RVMX Webhost)を利用しない RVMX WebHostソフトを利用しないの設定
c-2.RVMXドローンシュミレータの3D都市モデルの設定、詳細はRVMXドローンシュミレータを参照
d.スコープ取得インターバル(ms) RVMXドローンシュミレータよりの画面取得間隔を設定(ミリ秒)
e.タイムアウト監視(ms) RVMXドローンシュミレータとのコミニュニケーション切れを監視(ミリ秒)
f.プロセス間通信 RVMXドローンシュミレータとのコミニュニケーションをRVMXプロセス間通信を利用して行います
Offの時は疎結合(ファイル)で行う
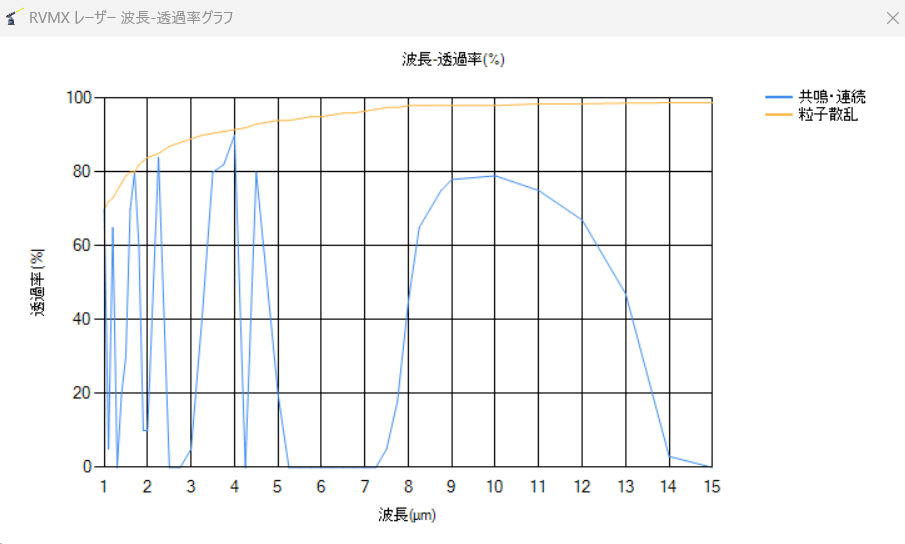
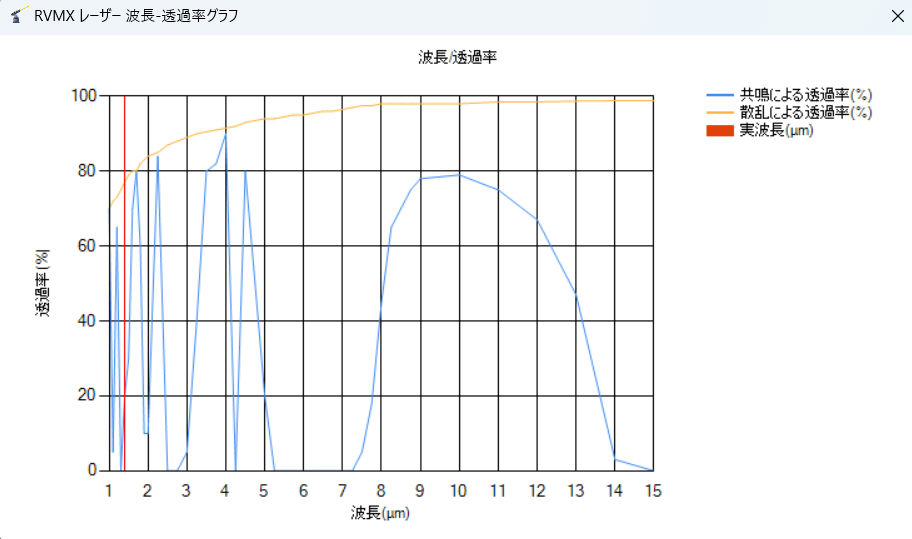
g.波長による透過率フィルター有効 波長により空気中の透過率が変わります、そのフィルターを有効にするか指定
f-1.波長による透過率グラフ 波長により空気中の透過率が変わります、そのグラフを表示します
h.地形を考慮 地形により遮断されるかを判定します。
i.フライトカメラ 基本的にRVMXドローンシュミレータは、飛行物を追跡するカメラです、これをフライトカメラと称しています。
Offにするとレーザー発射位置よりのカメラとなります(リアルカメラ)、
但しこの時はズームをしないと小さくて見えません。
よって、Offの時はズーム機能が有効となりまする
j.リアルカメラの上よりの視点 一般的に飛行物を地上から見るリアルカメラでは、背景が空となります。
しかし、これでは面白くない?位置が分かりづらい為に上よりの視点にすると背景に地上が見えるようになります。
k.リアルカメラで前回ズーム値を利用 リアルカメラでのズームはかなりアップしないと対象が見えてきません、
そのため前回のズーム値をりようにする機能です。
l.Cesiumのbing停止 この機能はCesiumよりBingを多く使っているとのメッセージが届きました、
そのために開発期間用に制限する機能を追加しました。但し、この機能は開発期間しか機能しません。
m.終了 ソフトを終了します。
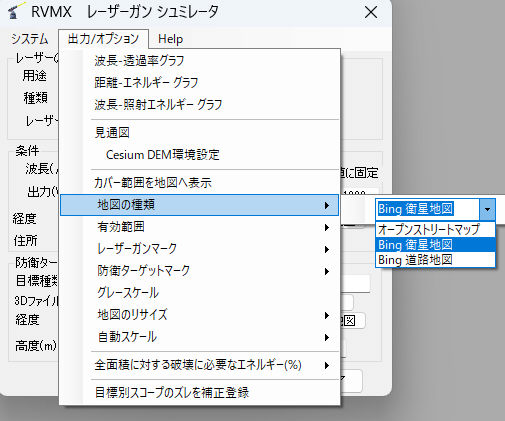
-2.出力/オプション シュミレーション結果の出力とオプションの設定
a.波長-透過率グラフ 波長-透過率グラフでf-1.波長による透過率グラフと略同じですが、これには実際のレーザーの波長が縦線で入っています。
b.距離-エネルギーグラフ 距離-エネルギーグラフで
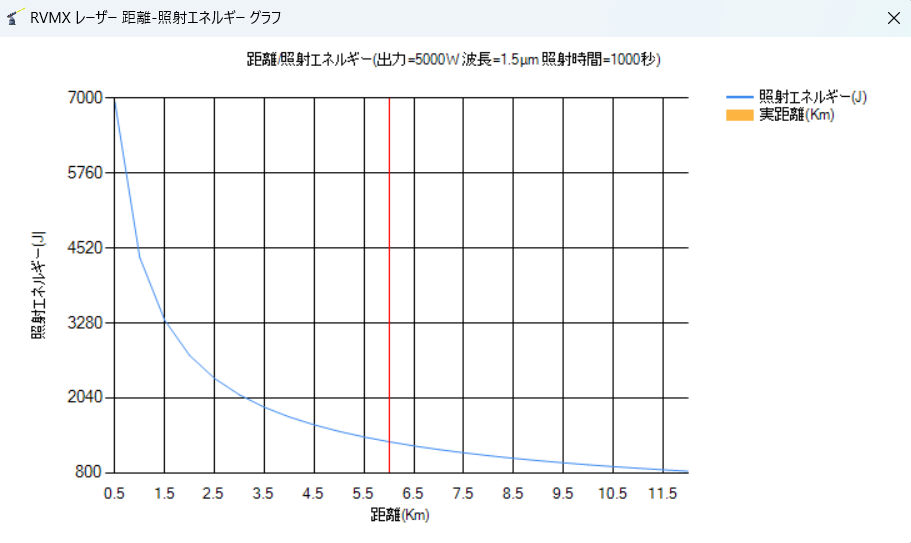
c.波長-照射エネルギーグラフ 波長に対して照射エネルギー変化グラフ

d.見通図 レーザーより標的までの地形見通図、空気濃度の変換に対する波が曲がる現象は地球の等価倍率を1.33で計算
 見通し例
見通し例
 遮蔽例
遮蔽例
d-1.CesiumDEM環境設定 Cesiumよりルートの高度を読み取る機能での環境設定
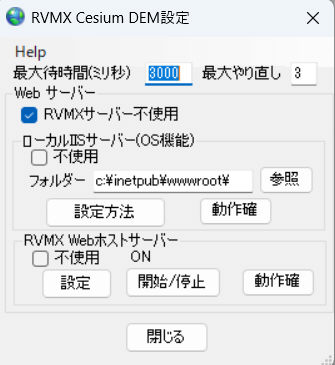
詳細はRVMX 全世界対応のCesiumを使ったDEM読み取りクラス(β版)のご紹介の3.Cesium環境設定を参照
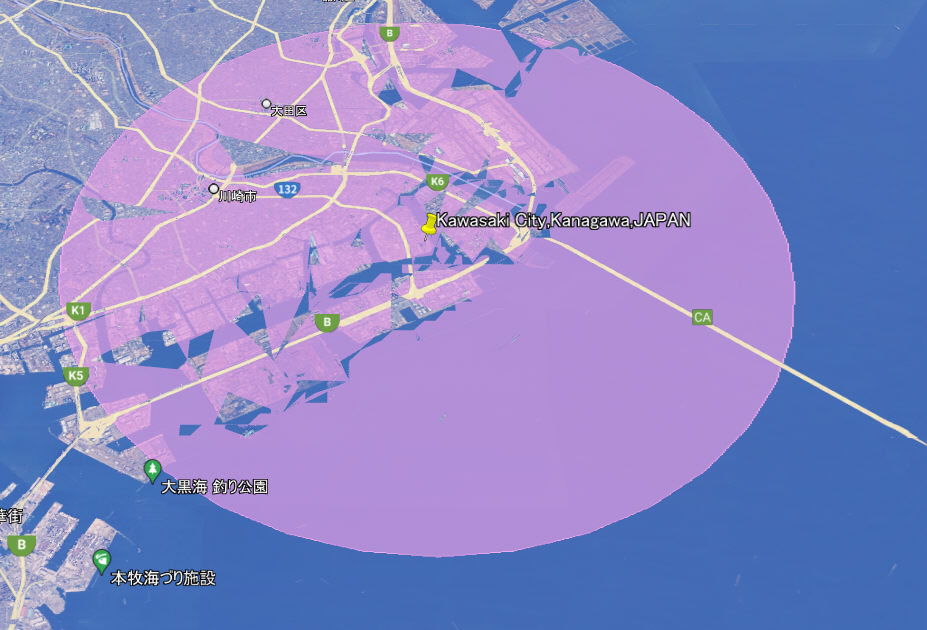
e.カバー範囲を地図へ表示 レーザーより標的への仰角でレーザー光が目的のエネルギーを届けられる範囲を地図へ表示
e-1.地図の種類 背景地図の種類を設定
e-1-1.オープンストリートマップ オープンストリート地図
e-1-2.bing衛星地図 bing衛星地図
e-1-3.bing道路地図 bing道路地図
e-2.有効範囲 レーザーの有効範囲を表示
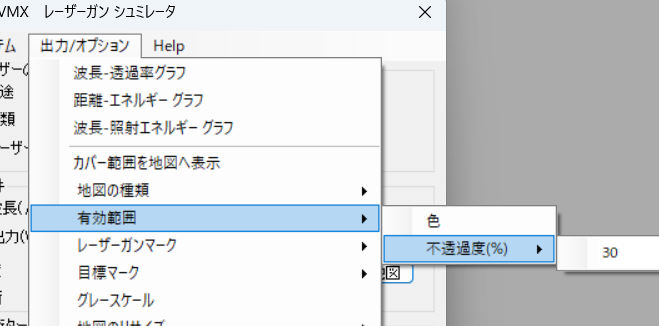
e-2-1.色 有効範囲を塗りつぶす色指定
e-2-2.不透過度(%) 〃 時の不透過度(%)を指定
e-3.レーザーガンマーク レーザーガンの位置表示
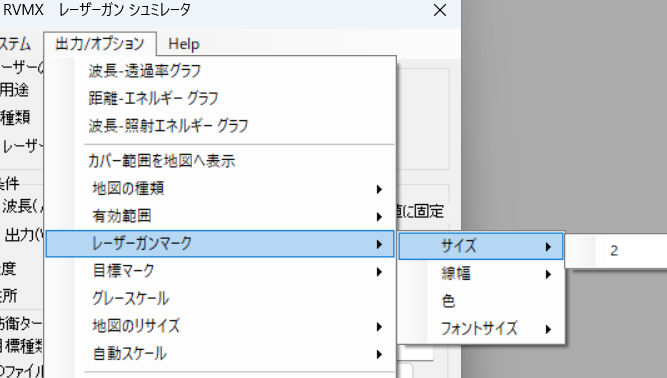
e-3-1.サイズ レーザーガンマークのサイズ倍率
e-3-2.線幅 〃 の線幅(ピクセル)
e-3-3.色 〃 の色指定
e-3-4.フォントサイズ 〃 のフォントサイズ
e-4.防衛ターゲットマーク 防衛ターゲットの位置表示
e-4-1.有効 〃 の作図有効
e-4-2.サイズ 〃 のサイズ倍率
e-4-3.線幅 〃 の線幅(ピクセル)
e-4-4.色 〃 の色指定
e-4-5.フォントサイズ 〃 のフォントサイズ
e-5.グレースケール 背景地図をグレースケールにします。
e-6.地図のリサイズ 地図のサイズを調整します
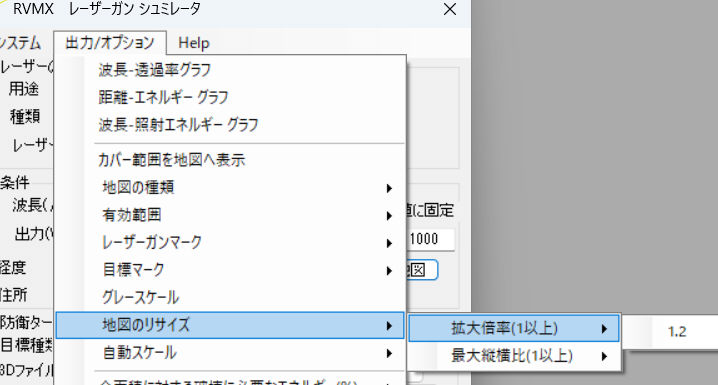
e-6-1.拡大倍率(1以上) 必要範囲に対して地図の範囲を大きくします
e-6-2.最大縦横比(1以上) 地図の縦横比の最大値を設定
e-7.自動スケール スケールを自動で付加します
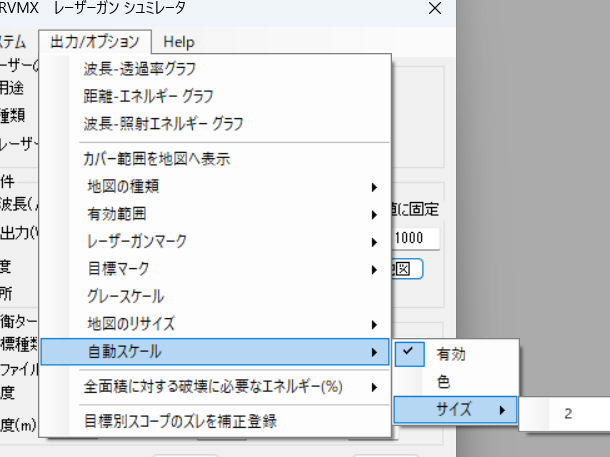
e-7-1.有効 〃 の作図有効
e-7-2.色 〃 の色指定
e-7-3.サイズ 〃 のサイズ倍率
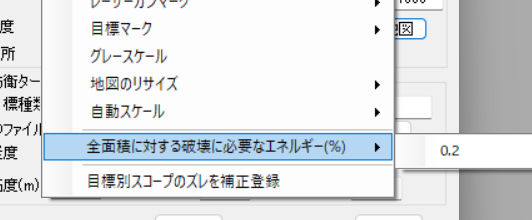
f.全面積に対する破壊エネルギー(%) 防衛ターゲットの全面積に対する必要破壊面積比率(%)
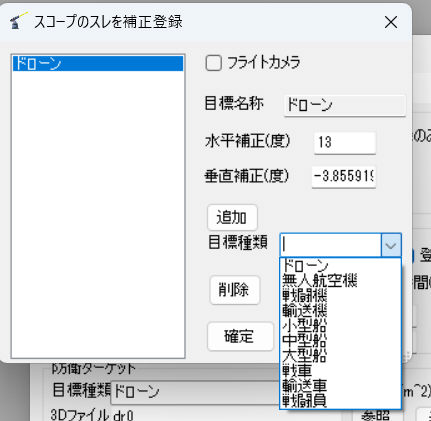
g.目標別スコープのズレを補正登録 目標の3D画像は癖がありズレが生じます、
そこで目標別スコープのズレを事前補正登録しておく機能ですが、現在効果は未確認
-3.Help
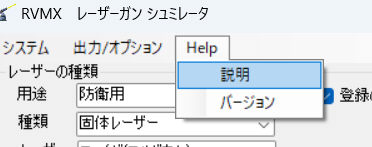
a.説明 本説明
b.バージョン ソフト情報
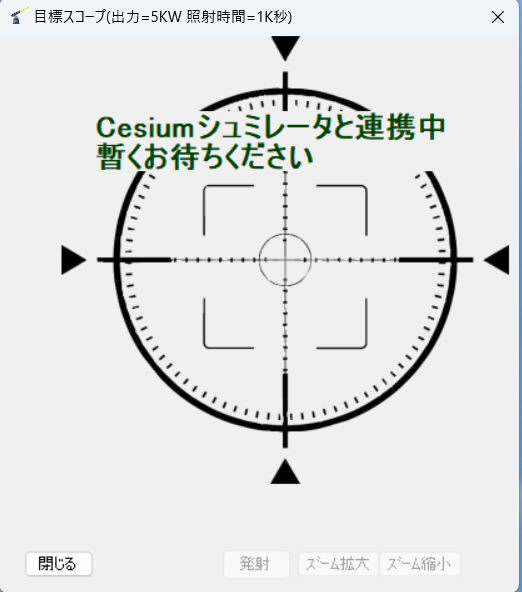
4.スコープの操作説明
-1.初期画面 Cesiumとの連携待ち画面
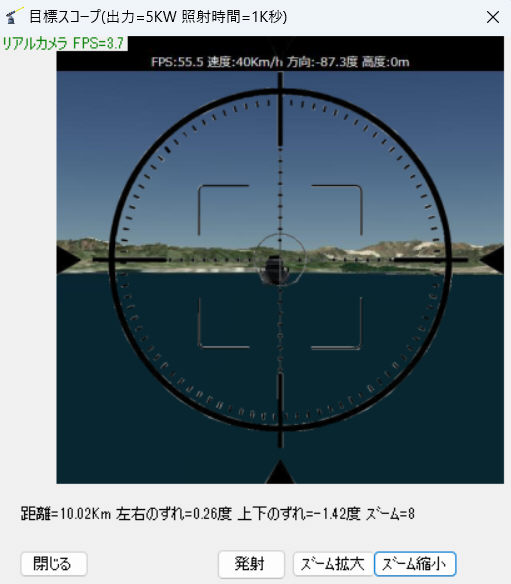
-2.Cesiumとの連携後画面
 無人航空機の例
無人航空機の例
 戦闘機の例
戦闘機の例
 輸送機の例
輸送機の例
 小型船の例
小型船の例
-3.画面操作 リアルカメラ時
-3-1.ズーム調整
-3-1-1.ズーム拡大・ズーム縮小ボタンで調整
-3-1-2.キーで直接Cesiumスクリプトへ
a.Cesiumスクリプトをアクティブにする
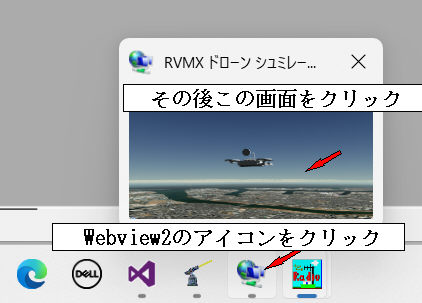 Webview2のアイコンより画面をクリック
Webview2のアイコンより画面をクリック
b.Zキー ズーム拡大
c.Shift+Zキー ズーム縮小
-3-2.照準合わせ
-3-2-1.Scope画面の左右上下にある矢印個所をクリックで調整

-3-2-2.キーで直接Cesiumスクリプトへ
a.Cesiumスクリプトをアクティブにする、方法はズームに同じ
b.左・右・上・下の矢印キーで調整
-3-2-3.照準が合うとロックインのメッセージが画面の上に出ます。外れるとロックアウトになります。
効果音が有効な時は音声メッセージでも出ます
標的がスコープの中に来ていてもロックオンにならない時は下記のズレ補正が必要です。
-3-3.Scopeズレの補正
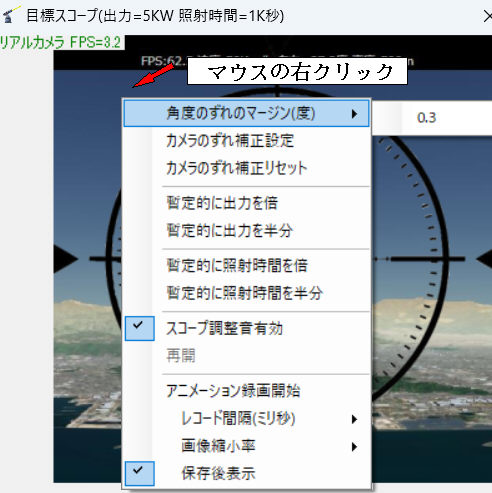
a.角度のズレのマージン(度) 照準のズレのマージン
b.カメラのズレ補正設定 標的がスコープま真ん中にあるのにも関わらずロックオンとならない時はここをクリック
c.カメラのズレ補正リセット 補正値をリセットします。
d.暫定的に出力を倍 パワー不足の時に、試し用
e.暫定的に出力を半分 パワーに余裕がある時、試し用
f.暫定的に照射時間を倍 パワー不足の時に、試し用
g.暫定的に照射時間を半分 パワーに余裕がある時、試し用
h.スコープ調整音有効 スコープ上で照準合わせの時に、動作確認用に音を発生
i.再開 スコープとCesiumの連携がうまくいかないときの再開指示
j.アニメーション録画開始 スコープ上の画像をアニメーション化開始、gif・htm・avi
j-1.レコード間隔(ミリ秒) アニメ化の画像記録間隔
j-2.画像縮小率 サイズを小さくするための縮小率
j-3.保存後表示 保存終了後表示
-3-4.発射ボタン レーザーガンの発射
ドローン破壊の例
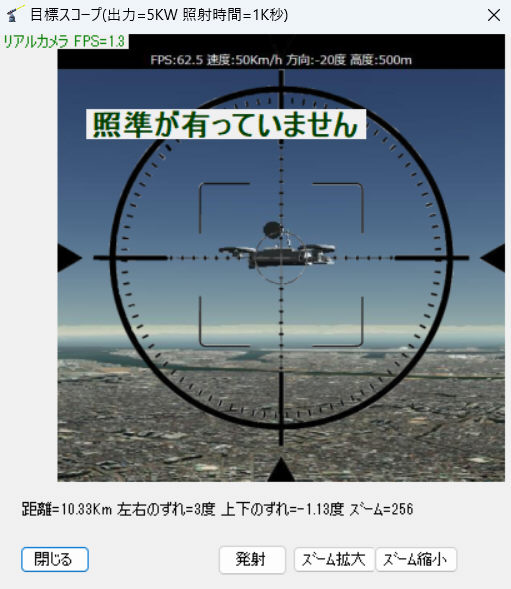 照準が有っていない時の例
照準が有っていない時の例
 エネルギー不足時の例
エネルギー不足時の例
5.地図表示での操作説明
プルダウンメニュー
-1.システム
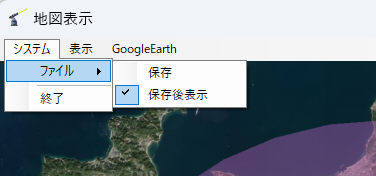
-1-1.ファイル
-1-1-1.保存 画像としてファイルへ保存します
-1-1-2.保存後表示 ファイルへ保存後表示します
-1-2.終了 画面を閉じます
-2.表示
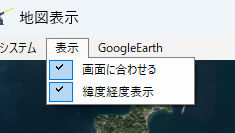
-2-1.画面に合わせる 地図サイズを画面に合わせます
-2-2.緯度経度を表示 マウスの位置の緯度経度を表示します
-3.GoogleEarth
GoogleEarthがインストールされている必要があります
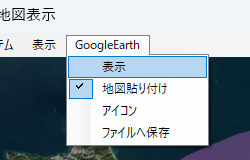
-3-1.表示 GoogleEarthで表示します
-3-2.地図貼り付け ルート地図を張り付けて表示
-3-3.アイコン ノードのアイコンを指定します
-3-4.ファイルへ保存 kmzファイルへ保存します
5.出力例
-1.レーザー照射結果のスコープ例
ドローン破壊例
 戦闘機破壊例
戦闘機破壊例
 部分破壊例
部分破壊例
 エネルギー不足例
エネルギー不足例
-2.グラフ表示の例
-3.地図上に有効範囲表示
 地形を考慮の例
地形を考慮の例
 地形を考慮無しの例
地形を考慮無しの例
 GoogleEarthへ出力例
GoogleEarthへ出力例
 地形を考慮無しでGoogleEarthへ出力例
地形を考慮無しでGoogleEarthへ出力例
-4.CityGMLによる建物表示例
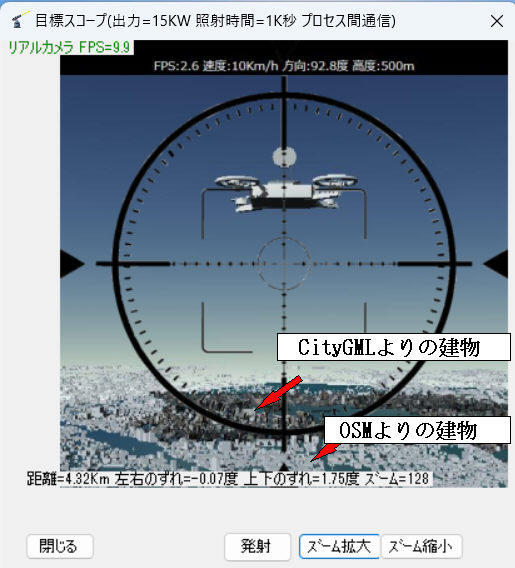 松山市の例
松山市の例
-5.アニメーション表示
7.その他
-1.2024/1現在レーザガンは未だ実用のものはありません
-2.レーザガンの設置位置は全て架空のものです
-3.標的が陸上を走行するものに関しては、モデルをGLにクランプしています、
その為道路以外を走行するとスコープ内の変動が大きくなり照準を合わせにくくなります。
実際は道路やある程度の平坦地の移動になると思いますが、本シュミレーションでは平気で山を乗り越えたりしますので使いずらいです。
-4.Cesiumよりの地形読み取りはアクセスを減らすと高速化の為、有効期限30日のキャツシユ機能を付けています。
-5.各プロセス間は出来るだけ疎結合で運用していますが,スコープのFPSを上げるためプロセス間通信も取り入れてみました。
効果は少し早くなる程度でした
-6.空気中のレーザー伝搬にはブルーミング現象により長距離は不可能です。
8.関連サイト
-1.RVMX 防衛関連ニュース
注意:
.Net Framework4.7.1以上がインストールされている必要が有ります。
現在β版で、完成予定は未定です。
本ソフトは、回線設計より参考で提供中はサポートの対象外となります
提供ソフトのQ&A
(有)RVMX

