RVMX Acceleration(加速度・角速度・ジャイロ)クラス(参考)
RVMX Acceleration(加速度・角速度・ジャイロ)クラス(参考)
概要 RVMX Acceleration(加速度・角速度・ジャイロ)クラス(参考)の機能です。
GPS等で位置情報は正確に把握できるようになりました。しかし、トンネル内等GPS電波が届かない所での位置把握のために開発しました。
また、RVMX Acceleration(加速度・角速度・ジャイロ)クラスにはロボット・ドローン等の姿勢制御への応用も考えられます。
その機能概要を紹介します。
現在開発中ですが2020年より一部提供開始予定。
1.利用方法
-1.コンクリート劣化判定での利用例。
2.機能概要
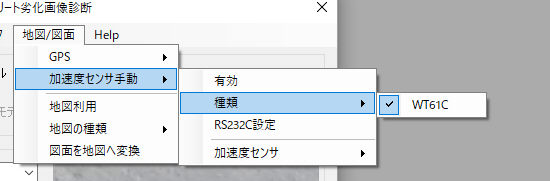
-1.対応センサ
a.WT61C メーカ:WitMotion(中国) 出力:TTL版 センサ:MPU6050(InvenSense製 3軸加速度+3軸ジャイロ)

インターフェイス TTL->RS232C変換とTTL->USB変換の2方式で確認
 TTL->RS232C変換
TTL->RS232C変換
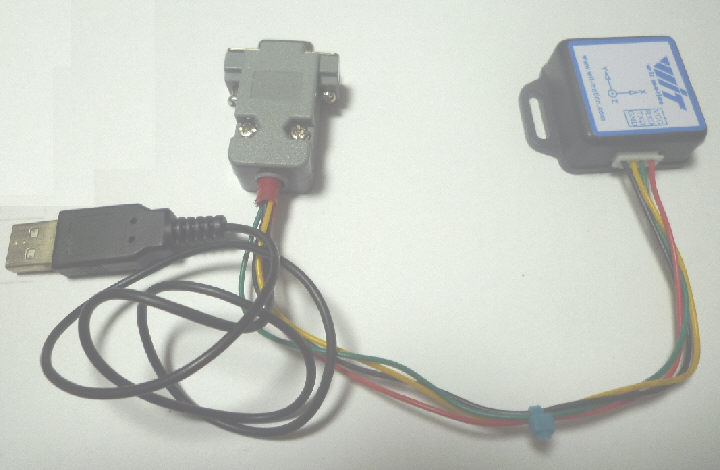 TTL->RS232C変換接続例
TTL->RS232C変換接続例
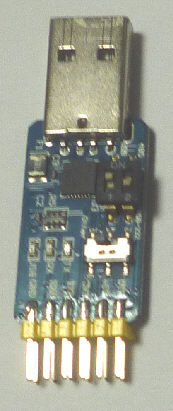 TTL->USB変換
TTL->USB変換
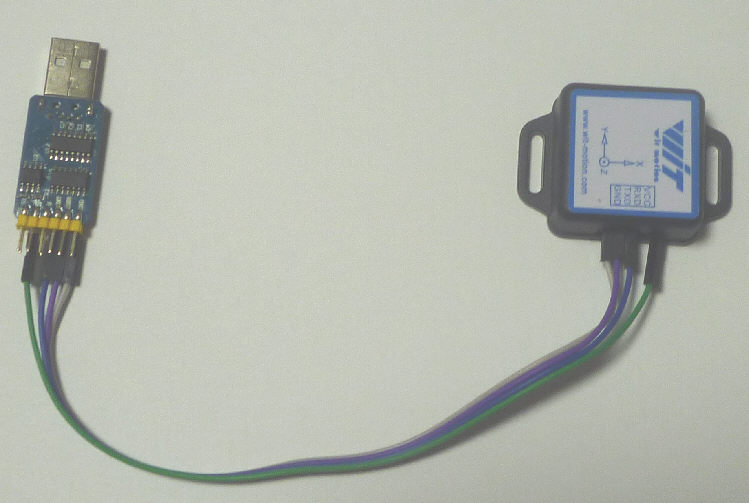 TTL->USB変換接続例
TTL->USB変換接続例
手配したセンサが不良品で、メーカ対応も悪いため中断(2020/2に連絡(mail電話)とも応答なし、コロナウィスルの関連で業務停止中?)
(Mailへの返事がない件はコロナウイルスの影響で有ることが判明、3月後半より中国より返事が届き始めました)
(USB・RS232C共同じようなデータ入力は出来ますが、肝心な加速度データが入ってこない、よってWT61Cの不良と判定)
b.HiLetgo MPU92/65 9軸 メーカ:HiLetgo(中国) 出力:I2C センサ:MPU9250(InvenSense製 開発用3軸加速度+3軸ジャイロ+3軸コンパス)
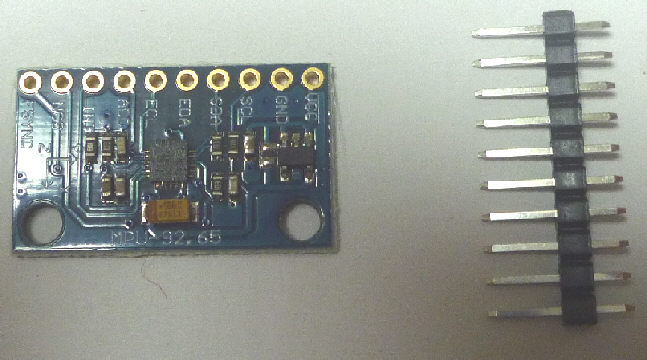
インターフェイス I2C->USB変換
 I2C->USB
I2C->USB
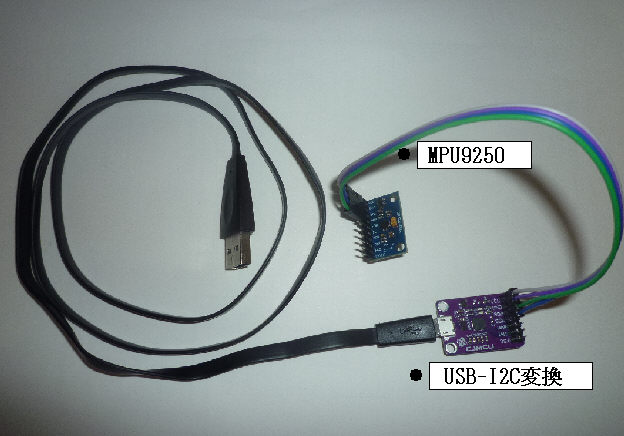 USB->I2C->MPU9250接続例
USB->I2C->MPU9250接続例
-2.出力 加速度・角速度・ジャイロ->指定緯度経度よりの移動を求める
3.機能検証
HiLetgo MPU92/65 9軸で検証、WT61Cはコロナウイルスの影響でメーカサポートが遅かったため未検証
-1.RVMX I2C Acceleration Checkerで検証
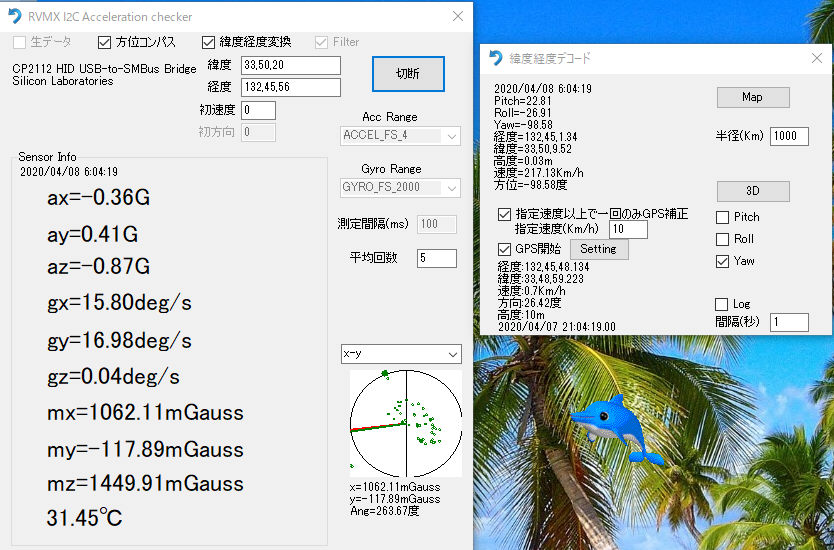 初回のみGPSで補正し、緯度経度へ変換中
初回のみGPSで補正し、緯度経度へ変換中
 ジャイロコンパスのX-Y表示(各種データより方位を算出)
ジャイロコンパスのX-Y表示(各種データより方位を算出)
4.その他
-1.緯度経度への変換はやはり、9軸のコンパス付が必要と思われます。しかし、精度は未知
-2.ドリフトが多く実用的かは不明。
-3.Quaternionはドローンやロボットの姿勢制御に使われます。
5.GPSの代わり機能を検証
トンネル内などGPSが動作しない場所での利用を検証
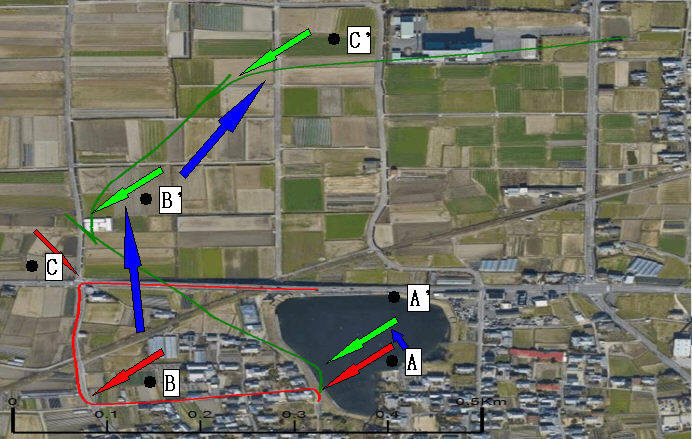 赤はGPS、緑は加速度センサより推定
赤はGPS、緑は加速度センサより推定
開発用のセンサのせいかも知れないが誤差が大きく、且つ誤差が蓄積する為、使い物にならないと判定
A->Cへ移動、Aの左折でも方位コンパスの精度が低い、Bの右折では方位コンパスが混乱している
加速度よりの速度の推定でも誤差が大きい
算出式を見直せば、改善は出来ると思うが、時間が掛かり過ぎる為開発を中断
よって、用途は姿勢制御等では。
6.関連ソフト

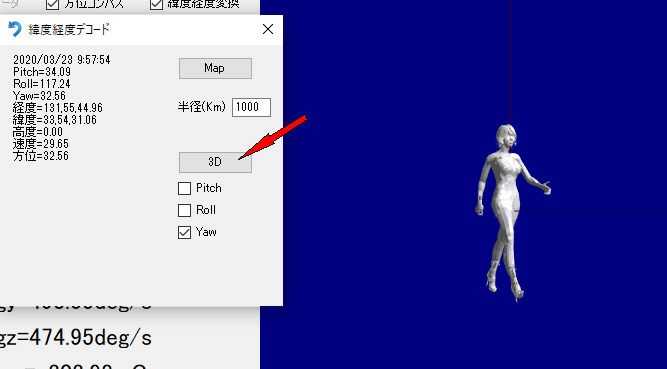 Quaternion変換による3D表示による姿勢制御確認機能
Quaternion変換による3D表示による姿勢制御確認機能